
Najnowsze

Pierwsze roboty kognitywne w Polsce od firmy MultiProjekt
Firma MultiProjekt wprowadza na rynek w Polsce nowość: roboty współpracujące niemieckiej firmy Neura Robotics, które stają się odpowiedzią na niedobory siły roboczej i aspiracje zwiększenia wydajności produkcji. Roboty kognitywne myślą, widzą i czują, aby mogły bezpiecznie funkcjonować ramię w ramię...
Czytaj więcej- Czworonożny robot chodzi i obsługuje przedmioty jednocześnie
- Robot do eksploracji jaskiń na Marsie
- Roboty do walki z pożarem
- „Inteligentne roje” maleńkich robotów
- Interfejs robota opanował delikatny dotyk
- Autonomiczny pojazd podwodny Hydrus
- Robot AI wykrywa chore tulipany
- Roboty pomogą ludziom w kosmosie
- Wspólne gotowanie robota z człowiekiem

Autonomiczne lotnisko przyszłości






Produkty






Firmy









Robotyka przemysłowa

ABB stawia na edukację: RobotStudio® wkracza na uczelnie, rewolucjonizując dziedzinę robotyki
Firma ABB chce wypełnić lukę edukacyjną, wychodząc z inicjatywą specjalistycznych kursów z zakresu robotyki dla studentów. Po wakacjach uruchomiony zostanie uszyty na miarę program, skierowany do zainteresowanych uczelni technicznych w Polsce.80 proc. specjalistów zajmujących się edukacją twierdzi, że roboty i...
Czytaj więcej- Pierwsza bezzałogowa maszyna leśna
- Produkcyjna wersja robota GR-1
- Robot Amiga dla rolnictwa
- Wykrywanie mikroplastiku za pomocą sztucznej inteligencji
- Yamaha Robotics prezentuje wielokrotnie nagradzany wysokowydajny automat YRM20 Dual Lane oraz nowe oprogramowanie
- Polska wykorzystuje coraz więcej robotów przemysłowych
- Ważenie Dozowanie Pakowanie 04/2023 – zawartość najnowszego numeru
- Ważenie Dozowanie Pakowanie 03/2023 – zawartość najnowszego numeru
- Pierwsze roboty kognitywne w Polsce od firmy MultiProjekt

Możliwość zautomatyzowania procesu lutowniczego






Robotyka edukacyjna

Roboty rozwiązaniem w zdalnym nauczaniu
Szkoły w Kumamoto w Japonii wprowadzają roboty do swoich klas, otwierając drzwi do przyszłości nauczania zdalnego! Dzięki zaawansowanej technologii uczniowie uczący się w domu mają teraz niepowtarzalną możliwość uczestniczenia w lekcjach na żywo, poruszania się po klasie i interakcji z...
Czytaj więcej- Roboty rozwiązaniem w zdalnym nauczaniu
- Społeczne roboty jako nauczyciele matematyki
- Ważenie, Dozowanie, Pakowanie – zawartość numeru 4/2022
- ABB i IKEA Industry w Zespole Szkół Technicznych
- ABB: Nauczmy się wprowadzać trwałe zmiany
- Tematyka numeru 2/2022 miesięcznika “Napędy i Sterowanie”
- Poradnik: Ile osi potrzebuje mój robot?
- OnRobot uruchomił Learn – bezpłatną platformę wiedzy
- Schneider Electric: W 2021 roku warto postawić na pracę robotów

Tematyka numeru 10/2023 miesięcznika “Napędy i Sterowanie”







Robotyka medyczna

Pierwszy na świecie robot humanoidalny produkowany masowo
W obliczu rosnącej liczby osób starszych w Chinach, Szanghajski gigant technologiczny - Fourier Intelligence - zaskakuje świat prezentacją robotycznej innowacji! Ich najnowszy projekt, humanoid GR-1, został stworzony z myślą o placówkach medycznych. Zdolny przenosić pacjentów z łóżka na wózki inwalidzkie...
Czytaj więcej- Autonomiczny robot do syntezy chemicznej
- Replika prawej komory serca w postaci robota
- Pierwszy na świecie robot humanoidalny produkowany masowo
- Pierwsze roboty kognitywne w Polsce od firmy MultiProjekt
- Od Chirurgii do Terapii: Jak Roboty Zmieniają Medycynę?
- Inteligentne mikroroboty z elektronicznymi „mózgami” chodzą samodzielnie
- Robot od NSK do pracy w szpitalu
- Moxi medyczny robot od Diligent Robots
- MIT: Zdalne leczenie udaru mózgu joystickiem

Robot „naśladuje” działania pracowników opieki






Robotyka badawcza

Kolejny Krok w Rozwoju Dronów
DRAGON, czyli Dual-rotor embedded multilink Robot with the Ability of multi-deGree-of-freedom aerial transformatiON (Wbudowany robot typu multilink z dwoma wirnikami i możliwością transformacji powietrznej o wielu stopniach swobody), to wyjątkowo innowacyjny dron składający się z czterech par odchylanych, kanałowych wentylatorów,...
Czytaj więcej- „Inteligentne roje” maleńkich robotów
- Autonomiczny pojazd podwodny Hydrus
- Roboty pomogą ludziom w kosmosie
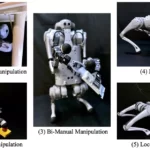
- Globalny projekt stworzenia ogólnego robota
- Autonomiczny robot do syntezy chemicznej
- Zautomatyzowane szybowce sprawdzają prądy oceaniczne
- Najmniejsze i najlżejsze roboty na świecie
- Mugatu – pierwszy dwunożny sterowany robot z jednym silnikiem
- Tesla zaprezentowała drugą generację humanoidalnego robota

Robot do eksploracji jaskiń na Marsie




















Robotyka transportowa

STRADVISION otwiera rozszerzone warsztaty autonomicznej jazdy w Korei Południowej
Firma STRADVISION, założona w 2014 roku, która opatentowała technologię percepcji wzrokowej opartej na sztucznej inteligencji dla zaawansowanych systemów wspomagania kierowcy (ADAS) i autonomicznych pojazdów, otworzyła nowy warsztat jazdy autonomicznej w Dongtan, w Korei Południowej. Warsztat służy do optymalizacji i kalibracji kamer i...
Czytaj więcej- Robot od Uber Eats dostarczy zamówienie w Tokio
- Autonomiczny ciągnik New Agri Concept
- Robot HEAP zbudował mur bez pomocy człowieka
- STRADVISION otwiera rozszerzone warsztaty autonomicznej jazdy w Korei Południowej
- AGILOX wprowadza nowego robota ODM
- SqUID robot do każdego magazynu
- Robot PixelPaint artystycznie maluje samochód
- VersaBox na rynku włoskim
- Robot KittyBot na stacji Shell
Autonomiczne lotnisko przyszłości







Robotyka użytkowa

Roboty zastąpią fotografów?
W Anglii w 2019 roku zadebiutował robot o nazwie Eva, stworzony przez firmę Service Robots, jako alternatywa dla tradycyjnych fotobudek. Dzięki "inteligentnemu systemowi rozpoznawania twarzy", Eva identyfikuje gości, oferując wykonanie zdjęcia, które można następnie wydrukować lub opublikować w mediach społecznościowych....
Czytaj więcej- Tematyka numeru 4/2024 miesięcznika “Napędy i sterowanie”
- Roboty do walki z pożarem
- Interfejs robota opanował delikatny dotyk
- Robot AI wykrywa chore tulipany
- Tematyka numeru 3/2024 miesięcznika “Napędy i sterowanie”
- Wspólne gotowanie robota z człowiekiem
- Tematyka numeru 2/2024 miesięcznika “Napędy i Sterowanie”
- Tematyka numeru 1/2024 miesięcznika “Napędy i Sterowanie”
- Robot LG pomoże w domowych obowiązkach
Czworonożny robot chodzi i obsługuje przedmioty jednocześnie












Robotyka militarna i policyjna

Roboty wojskowe UGV w Estonii
W czerwcu Milrem Robotics, firma z Estonii, pokazała światu swojego robota THeMIS 4.5 podczas dwudniowych testów. Te roboty, choć obiecujące, mają jeszcze wiele do udowodnienia. Aktualne wyposażenie technologiczne, w tym czujniki LIDAR, mimo swojej zaawansowanej technologii, boryka się z trudnościami...
Czytaj więcej- Roboty wojskowe UGV w Estonii
- Psy-roboty policyjne: Innowacja czy zagrożenie dla praw obywatelskich?
- Projekt robota wojskowego na konferencji European Defence Innovation Days
- Pół-automatyczny uzbrojony robot gotowy do obrony
- Polski robot bojowy Perun
- Roboty od PIAP dla policyjnych techników bombowych
- Robotyczny pies – snajper – find the oil, buddy!
- Nanodrony przyszłością wojska?
- Autonomiczny robot do rozbrajania min morskich

Robot „latający smok” do gaszenia pożarów na odległość






Robotyka hobbistyczna

Roboty-towarzysze: Wsparcie dla osób z demencją w codziennych zadaniach
Inżynierowie z University of Waterloo opracowali nowy sposób programowania robotów, które mogą pomagać osobom cierpiącym na demencję w odnajdywaniu zgubionych przedmiotów, takich jak leki, okulary czy telefony. Choć początkowo technologia ma na celu wsparcie specyficznej grupy ludzi, w przyszłości mogłaby...
Czytaj więcej- Kieszonkowy robot AIBI – współczesny Tamagotchi z ChatGPT
- Roboty-towarzysze: Wsparcie dla osób z demencją w codziennych zadaniach
- Wielkanoc już za 9 miesięcy – spraw sobie robota Egg-bot
- Asimo przechodzi na emeryturę
- Engineered Arts przedstawił światu Amecę
- European Rover Challenge 2021 – podsumowanie
- Chcesz poczuć się jak na Marsie? Wystarczy, że udasz się do… Kielc!
- Roboty zabawki od Disneya robią ogromne wrażenie
- European Rover Challenge: Trzy dni inspiracji kosmosem na ERC 2021

Robot gra w gry wideo z ludźmi






Wydarzenia

Projekt robota wojskowego na konferencji European Defence Innovation Days
Firma Botsi z Gdyni zaprezentowała swój innowacyjny projekt robota opartego na sztucznej inteligencji podczas dwudniowej konferencji w Brukseli. Wydarzenie, znane jako Europejskie Dni Innowacji Obronnych, odbyło się jako najważniejsze spotkanie poświęcone technologii obronnej w Europie. Jako jedyna polska firma, Botsi...
Czytaj więcej- Field Robot Event 2023 już 13 czerwca na Uniwersytecie w Mariborze w Słowenii
- Relacja z majowych targów Warsaw Industry Automatica 2023
- PROGRAMISTA ROBOTÓW PRZEMYSŁOWYCH/ PROGRAMISTA PLC
- ITM – zapowiedź
- Środkowoeuropejskie Forum Technologiczne już w październiku
- Axon Media w Bielsku-Białej
- European Rover Challenge już w ten weekend
- Axon Media rozpocznie sezon w Rumii
- European Rover Challenge 2022 coraz bliżej

Projekt robota wojskowego na konferencji European Defence Innovation Days



























